

X man-800型轮足式机器人现场应用
搭载智能感知模块,构建复杂环境的3D地图,具有精准的环境感知能力,以及智能的规划、决策与交互能力。
利用感知、移动和交互能力,将互联网与云端的大数据和服务,应用到电力巡检、施工监理等现实世界中。





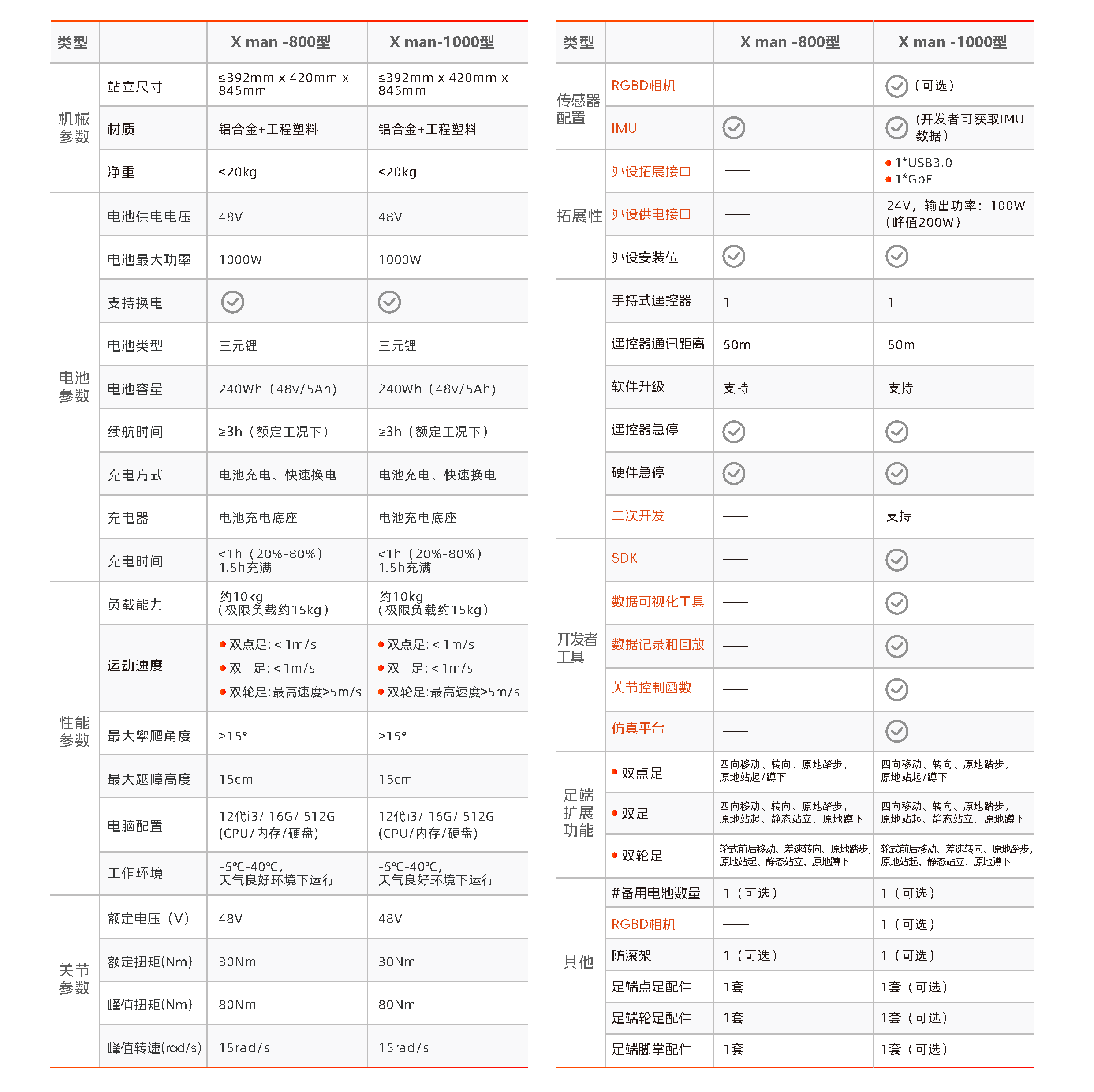
技术参数表
-

- 微信: 18616788510
- 客服热线 021-65860886